
الاستعدادات الرئيسية قبل الاندماج
قبل الغوص في توصيل الأسلاك والترميز، تأكد من أن لديك جميع الأدوات والمكونات اللازمة. غالبًا ما يؤدي تخطي هذه الخطوة إلى أخطاء يمكن تجنبها (مثل الوحدات المقلية أو عدم نقل البيانات).
1.1 المكونات المطلوبة
| المكوّن | المواصفات والغرض |
|---|---|
|
جهاز تحديد المدى بالليزر |
واجهة تسلسلية TTL (3.3 فولت)، موصل 0.8WTB-6Y-2، نطاق 3 أمتار كحد أدنى، معدل الباود الافتراضي 115200 بت في الثانية |
|
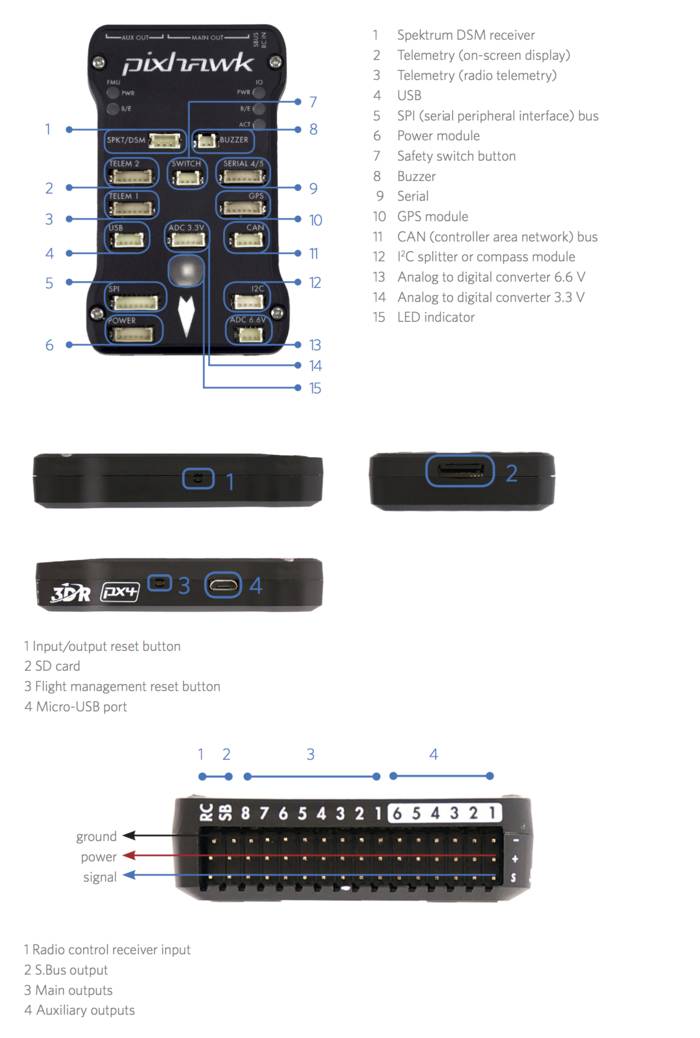
وحدة التحكم في الطيران المتوافقة مع AP |
Pixhawk 2.4.8/4/6 (الأكثر شيوعًا)، مع منفذ UART واحد مجاني على الأقل (على سبيل المثال، TELEM2 وGPS2) |
|
محول USB-TTLTL (CH340) |
لاختبار الاتصال التسلسلي ل SFA2000B قبل التوصيل بوحدة التحكم في الطيران |
|
أسلاك دوبونت المحمية |
للحد من التداخل الكهرومغناطيسي (EMI) من محركات الطائرة بدون طيار/مراكز التحكم الإلكتروني الكهرومغناطيسي |
|
وحدة طاقة خارجية 3.3 فولت/1 أمبير (اختياري) |
إذا لم يتمكن منفذ 3.3 فولت لوحدة التحكم في الطيران من توفير 500 مللي أمبير (ذروة تيار بدء التشغيل في SFA2000B) |
1.2 أدوات البرمجيات
- مخطط المهام: المحطة الأرضية الرسمية لـ ArduPilot (تنزيل هنا). تُستخدم لتهيئة معلمات وحدة التحكم في الطيران والتحقق من صحة البيانات.
- SSCOM/SecureCRT: أدوات تصحيح الأخطاء التسلسلية لاختبار بروتوكول SFA2000B (إرسال الأوامر والتحقق من بيانات المسافة).
- كود مصدر ArduPilot (اختياري): للمستخدمين المتقدمين الذين يحتاجون إلى تجميع البرامج الثابتة المخصصة (على سبيل المثال، النطاق المستمر 10 هرتز).
الخطوة 1: اختبر البروتوكول التسلسلي ل SFA2000B (حاسم!)
يستخدم SFA2000B جهاز SFA2000B بروتوكول سداسي عشري مخصص (وليس MAVLink، لغة ArduPilot الأصلية). أولاً، تأكد من أن الوحدة تعمل بشكل مستقل لاستبعاد عيوب الأجهزة.
1.1 قم بتوصيل SFA2000B بمحول USB-TTL
قم بتوصيل الوحدة بالكمبيوتر باستخدام محول USB-TTL. اتبع تخطيط السنون من ورقة بيانات SFA2000B:
| دبوس محول USB-TTL-TTL | دبوس SFA2000B | الوصف |
|---|---|---|
|
3.3V |
السن 5 (VCC) |
قم بتشغيل الوحدة (لا تستخدم أبدًا 5 فولت-خطر الاحتراق!) |
|
GND |
الدبوس 6 (GND) |
أرضية مشتركة (ضرورية للتواصل المستقر) |
|
TXD |
الدبوس 2 (RXD) |
يرسل الكمبيوتر الأوامر إلى SFA2000B |
|
RXD |
الدبوس 3 (TXD) |
يرسل SFA2000B بيانات المسافة إلى الكمبيوتر |
1.2 إرسال الأوامر والتحقق من البيانات
- معدل الباود 115200bps 115200bps
- بتات البيانات: 8، بتات إيقاف: 1، التماثلية: لا يوجد
- تحقق من “إرسال سداسي عشري” و “عرض سداسي عشري”
الاختبار 1: أمر تحديد المدى واحد
55 AA 88 88 FF FF FF FF FF FF 84
ستقوم الوحدة النمطية بإرجاع استجابة مثل:
55 AA 88 88 88 01 FF 4E 23 C8
55 أأ: رأس الإطار (يؤكد البيانات الصالحة)01: الحالة (1 = نجاح، 0 = فشل)4E 23: بيانات المسافة (سداسي عشري ← عشري = 20003 ← القسمة على 10 ← 2000.3م)C8: المجموع الاختباري (التحقق من الصحة: مجموع البايتات من 1 إلى 7، مع أخذ آخر 8 بتات)
إذا أظهرت الاستجابة مسافة صالحة (مطابقة للمسافة المستهدفة الفعلية)، فإن الوحدة تعمل. إذا لم يكن الأمر كذلك، تحقق من الأسلاك أو اتصل بالشركة المصنعة (يتمتع SFA2000B بضمان لمدة عام واحد).
الخطوة 2: قم بتوصيل SFA2000B بوحدة التحكم في الطيران
الآن قم بتوصيل الوحدة بمنفذ UART المجاني لوحدة التحكم في الطيران (سنستخدم TELEM2 في هذا المثال).
2.1 مخطط الأسلاك (Pixhawk 4 + SFA2000B)
| دبوس Pixhawk 4 TELEM2 | دبوس SFA2000B | الوصف |
|---|---|---|
|
3.3V |
السن 5 (VCC) |
الطاقة (استخدم طاقة خارجية 3.3 فولت/1 أمبير إذا كان منفذ 3.3 فولت أقل من الطاقة المطلوبة) |
|
GND |
الدبوس 6 (GND) |
أرضية مشتركة |
|
TX (إرسال وحدة التحكم في الطيران) |
الدبوس 2 (RXD) |
ترسل وحدة التحكم في الطيران أوامر تحديد المدى إلى الوحدة النمطية |
|
RX (استقبال وحدة التحكم في الطيران) |
الدبوس 3 (TXD) |
تستقبل وحدة التحكم في الطيران بيانات المسافة من الوحدة |
2.2 نصائح الأسلاك الحرجة
- الأسلاك المحمية: استخدم كبلات محمية لـ TX/RX لتقليل التداخل الكهرومغناطيسي الكهرومغناطيسي من المحركات (الأسلاك غير المحمية تسبب تلف البيانات).
- عزل الطاقة: إذا لم يتمكن منفذ 3.3 فولت بوحدة التحكم في الطيران من توفير 500 مللي أمبير، فقم بتوصيل وحدة خارجية 3.3 فولت/1 أمبير (على سبيل المثال، منظم خفض التدريج 3.3 فولت من Pololu) لتجنب انقطاع التيار الكهربائي.
- حماية الدبوس: قم بتغطية الدبابيس غير المستخدمة (على سبيل المثال، الدبوس 1: الطاقة-EN) بشريط كهربائي لمنع حدوث دوائر كهربائية قصيرة.
الخطوة 3: تكوين معلمات البرنامج الثابت ArduPilot (AP)
لا يدعم ArduPilot بروتوكول SFA2000B في الأصل، لذلك سنستخدم بروتوكول مستشعر تسلسلي مخصص ميزة (AP 4.3.0+) لتعيين بيانات الوحدة النمطية إلى وحدة التحكم في الطيران.
3.1 توصيل مخطط المهمة بوحدة التحكم في الطيران
- قم بتشغيل وحدة التحكم في الطيران وتوصيلها بالكمبيوتر عبر USB.
- افتح مخطط المهمة → حدد منفذ COM الصحيح → انقر فوق “اتصال”.
- انتقل إلى التكوين/الضبط → شجرة المعلمات الكاملة (هنا سنقوم بتعديل جميع الإعدادات).
3.2 تكوين منفذ UART (TELEM2)
أولاً، قم بإعداد منفذ TELEM2 لوحدة التحكم في الطيران للاتصال ب SFA2000B:
| المعلمة | القيمة | الوصف |
|---|---|---|
|
سيرال2_بود |
115200 |
مطابقة معدل البث بالباود الافتراضي ل SFA2000B |
|
المسلسل2_بروتوكول_المتسلسل |
23 |
تمكين وضع “المستشعر المخصص” (حاسم!) |
|
الخيارات_المتسلسلة 2_خيارات |
|
لا توجد خيارات خاصة (تم الضبط على 1024 إذا كان EMI يمثل مشكلة) |
3.3 تكوين محدد المدى (RangeFinder1)
بعد ذلك، أخبر ArduPilot أن يتعامل مع SFA2000B كجهاز تحديد المدى:
| المعلمة | القيمة | الوصف |
|---|---|---|
|
RNGFND1_TYPE |
32 |
حدد “مسلسل مخصص” (للبروتوكولات المخصصة) |
|
RNGFND1_MIN_CMIN_CM |
300 |
الحد الأدنى للنطاق (3 أمتار = 300 سم، تطابق المنطقة العمياء ل SFA2000B) |
|
RNGFND1_MAX_CMX_CM |
200000 |
أقصى مدى (2000 متر = 200000 سم) |
|
مقياس RNGFND1_SCALE |
0.1 |
تحويل بيانات الوحدة (القسمة على 10: 20003 → 2000.3م) |
|
RNGFND1_ORIENT |
25 |
اتجاه التركيب (25 = لأسفل، لتثبيت الارتفاع؛ 0 = للأمام لتجنب العوائق) |
3.4 تعريف تنسيق بيانات SFA2000B
أخيراً، علّم ArduPilot كيفية تحليل استجابة SFA2000B السداسية (الإطار 55 aa 88 88 01 ff xx xx xx yy):
| المعلمة | القيمة | الوصف |
|---|---|---|
|
نوع_حارس_المستشعر |
1 |
نوع المستشعر = محدد المدى |
|
منفذ_الحارس_المتسلسل |
2 |
استخدام TELEM2 (المنفذ 2) للاتصال |
|
CUST_DATA_LEN |
8 |
يبلغ طول استجابة SFA2000B 8 بايت |
|
CUST_HEADER1 |
0x55 |
البايت الأول من رأس الإطار |
|
CUST_HEADER2 |
0xAA |
البايت الثاني من رأس الإطار |
|
إزاحة_بيانات_الحارس |
5 |
تبدأ بيانات المسافة عند البايت 5 (XX في الإطار) |
|
cust_data_bytes |
2 |
بيانات المسافة 2 بايت (16 بت) |
|
CUST_ENDIAN |
|
قليل الإندين (تحقق من الوحدة الخاصة بك - معظم وحدات SFA2000B تستخدم الإندين الصغير) |

الخطوة 4: إرسال أوامر تحديد المدى من وحدة التحكم في الطيران
لن يرسل SFA2000B البيانات ما لم يتلق أمرًا. سنستخدم ArduPilot's ArduPilot's البرمجة النصية لـ Lua لجعل وحدة التحكم في الطيران ترسل الأوامر تلقائياً.
4.1 إنشاء برنامج نصي للوا
- في مخطط المهمة، انتقل إلى التكوين/الضبط → البرامج النصية للوا.
- انقر فوق “نص برمجي جديد” والصق الكود أدناه (يرسل أمر نطاق واحد كل ثانية واحدة):
-- البرنامج النصي لأمر تحديد المدى SFA2000B (1 هرتز)
منفذ_مسلسلي محلي = serial.open(2، 115200) -- المنفذ 2 = TELEM2، 115200 بت في الثانية
محلي_نطاق_مفرد_cmd = string.char(0x55, 0xAA, 0xAA, 0x88, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0x84) -- أمر نطاق واحد
-- إرسال أمر كل 1000 مللي ثانية (1 هرتز)
الدالة send_command()
منفذ_مسلسل:اكتب(أمر_نطاق_أحادي_Cmd)
gcs:إرسال_نص (6, "SFA2000B: تم إرسال الأمر (1 هرتز)") -- السجل إلى المحطة الأرضية
إرجاع send_command، 1000 - كرر كل 1 ثانية
إنهاء
-- بدء الحلقة
إرجاع send_command ()
- احفظ البرنامج النصي باسم
sfa2000b_cmd.luaوانقر على “تحميل البرنامج النصي” (ستقوم وحدة التحكم في الطيران بتشغيله عند بدء التشغيل).
4.2 للنطاق المستمر (5 هرتز/10 هرتز)
لاستخدام الوضع المستمر لجهاز SFA2000B (على سبيل المثال، 10 هرتز للطائرات بدون طيار سريعة الحركة)، استبدل نطاق_فردي_مد بأمر مستمر:
- أمر 5 هرتز:
55 AA B9 FF FF FF FF D4(المجموع الاختباري = 0x55+0xAA+0xAA+0xB9+0xFF*4 = 0xD4) - أمر 10 هرتز:
55 AA C9 FF FF FF FF C4(المجموع الاختباري = 0x55+0xAA+0xC9+0xFF*4 = 0xC4)
الخطوة 5: التحقق من صحة التكامل
بمجرد حفظ جميع الإعدادات، أعد تشغيل وحدة التحكم في الطيران وتحقق من تدفق البيانات بشكل صحيح.
5.1 التحقق من البيانات في الوقت الحقيقي في مخطط البعثة
- انتقل إلى الحالة علامة التبويب → ابحث عن قيمة “RangeFinder1”.
- يجب أن تتطابق مع المسافة الفعلية للهدف (على سبيل المثال، 5.2 متر إذا كانت الطائرة بدون طيار على ارتفاع 5.2 متر فوق الأرض).
- إذا أظهر “0” أو “NaN”، أعد فحص الأسلاك والمعلمات.
- للتأكيد المرئي، انتقل إلى بيانات الرحلة علامة التبويب → حدد “القرب” من القائمة المنسدلة.
- إذا كانت الوحدة مُركّبة لأسفل (RNGFND1_ORIENT=25)، سترى تحديث المسافة “لأسفل” في الوقت الفعلي.
5.2 الاختبار الميداني (حاسم!)
- ضع الطائرة بدون طيار على ارتفاع 5 أمتار فوق سطح مستوٍ (مثل أرضية خرسانية).
- تأكد من أن قيمة RangeFinder1 تقرأ حوالي 5.0 م (الخطأ ± 0.5 م، وفقًا لمواصفات SFA2000B).
- حرّك الطائرة بدون طيار لأعلى/لأسفل ببطء - تأكد من تحديث المسافة بسلاسة (لا قفزات > 1 متر).
الأسئلة الشائعة: المشكلات الشائعة والحلول
س1: لا تعرض وحدة التحكم في الطيران بيانات RangeFinder، ولكن SFA2000B يعمل مع محول USB-TTL.
- تحقق مما إذا كان TX/RX معكوسًا (وحدة التحكم في الطيران TX → SFA2000B RXD؛ وحدة التحكم في الطيران RX → SFA2000B TXD).
- تحقق
مسلسل2_بروتوكول2_بروتوكول=23(وليس 1 ل MAVLink) وCUST_HEADER1=0x55,CUST_HEADER2=0xAA. - تأكد من تحميل النص البرمجي Lua (تحقق من علامة التبويب “الرسائل” في مخطط المهمة بحثًا عن “SFA2000B: تم إرسال الأمر”).
س2: بيانات المسافة متقلبة (على سبيل المثال، 5 م ← 12 م ← 3 م).
- استبدل الأسلاك غير المحمية بأسلاك محمية (قم بتأريض الدرع إلى GND لوحدة تحكم الطيران).
- استخدم وحدة طاقة خارجية 3.3 فولت/1 أمبير (قد يكون منفذ 3.3 فولت لوحدة التحكم في الطيران غير مستقر تحت الحمل).
- نظف النافذة البصرية لكاميرا SFA2000B بقطعة قماش خاصة بالعدسة (يتسبب الغبار في حدوث أخطاء في الانعكاس).
س3: يُرجع SFA2000B الحالة 0 (فشل: 55 aa 88 88 00 ff ff ff ff ff yy).
- الهدف في المنطقة العمياء للوحدة النمطية (≤3 م) - قم بتحريك الطائرة بدون طيار بعيدًا.
- يتمتع الهدف بانعكاسية منخفضة (مثل الأشجار والمياه) - اختبرها بجدار خرساني.
- يتعرض ضوء الشمس بشكل غير مباشر إلى جهاز الاستقبال الخاص بالوحدة - قم بحماية العدسة أو اختبرها في الظل.
س4: هل يمكنني استخدام SFA2000B لتجنب العوائق (وليس فقط تثبيت الارتفاع)؟
- مجموعة
rngfnd1_orient=0(إلى الأمام) أو1(إلى الوراء) في المعلمات. - استخدم أمر تحديد المدى المستمر (5 هرتز/10 هرتز) في نص Lua النصي لتحديثات أسرع.
- الإقران مع ميزة “تجنب العقبات” في ArduPilot (تمكين
التمكين_التفادي_التفادي=1).
الملاحظات الختامية
SFA2000B هو جهاز تحديد مدى قوي للطائرات بدون طيار، ولكن بروتوكوله المخصص يتطلب تكوينًا دقيقًا للعمل مع ArduPilot. من خلال اتباع هذا الدليل - اختبار الوحدة أولاً، وتوصيل الأسلاك بعناية، وتكوين المعلمات خطوة بخطوة - ستحصل على بيانات موثوقة عن المسافة لتثبيت الارتفاع أو تجنب العوائق أو رسم الخرائط.
إذا واجهت مشاكل مستمرة، اتصل بـ
مجتمع ArduPilot: المنتديات (مساعدة الخبراء في البرامج الثابتة/المعلمات).